VPG; RRT; MPNET; PID
Project 1:
*Implement (bi)RRT, (bi)RRTConnect, RRT* for cars and 6-DOF robot arms*
References:
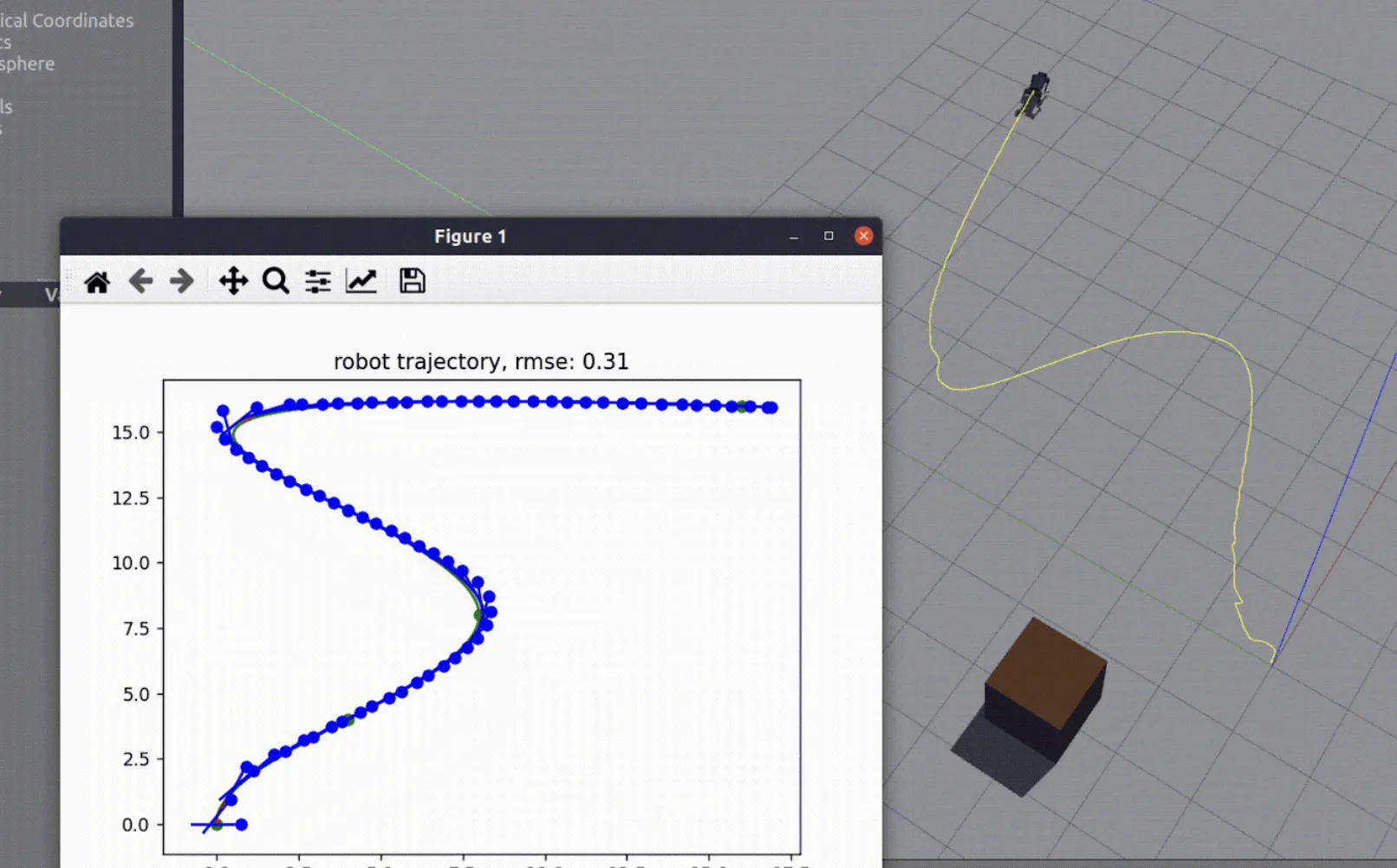
Project 2:
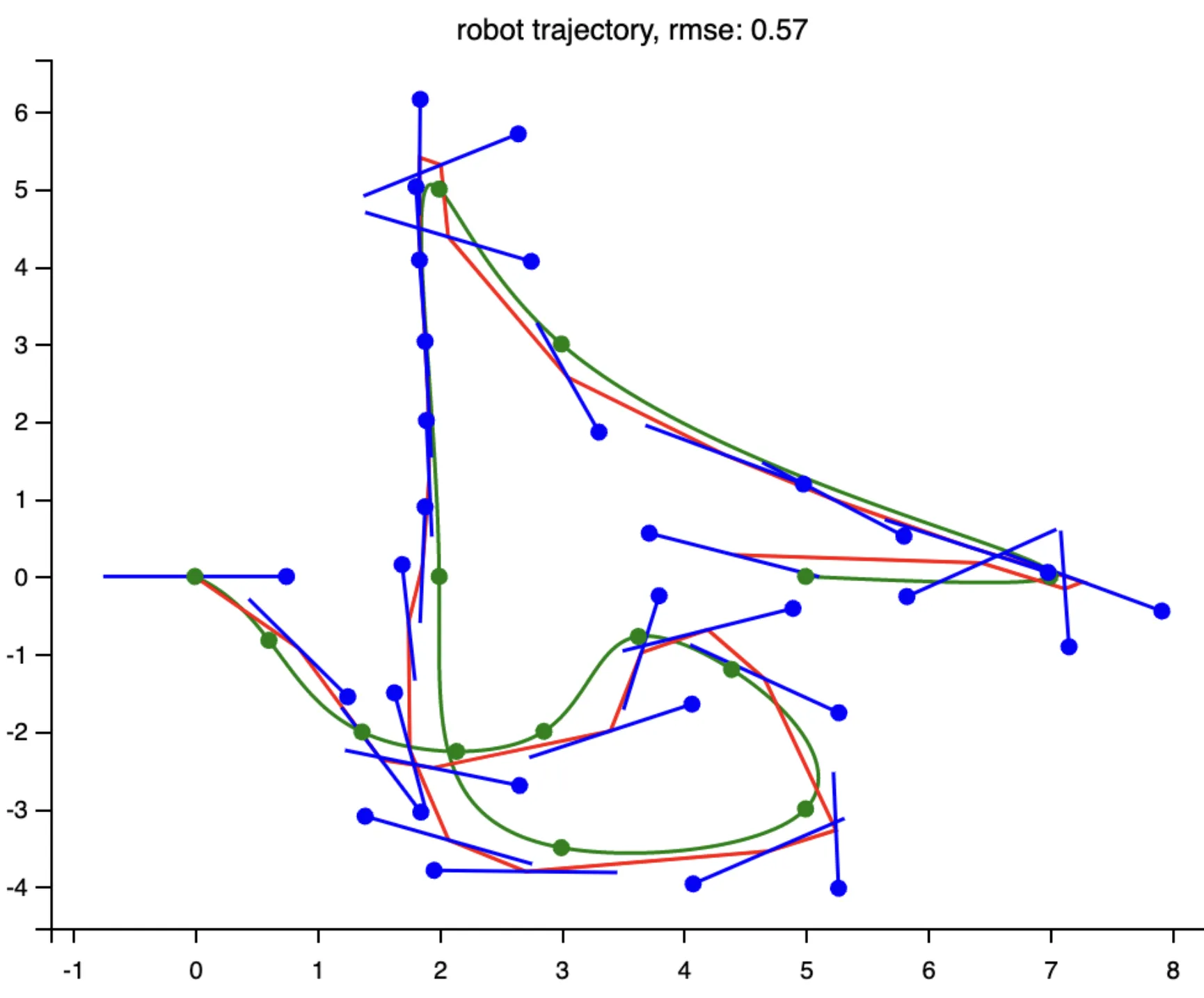
Implemented Iterative & Analytic PID for 2-DOF arms
Extended this to control a Unitree A1 Robot in Gazebo sim:
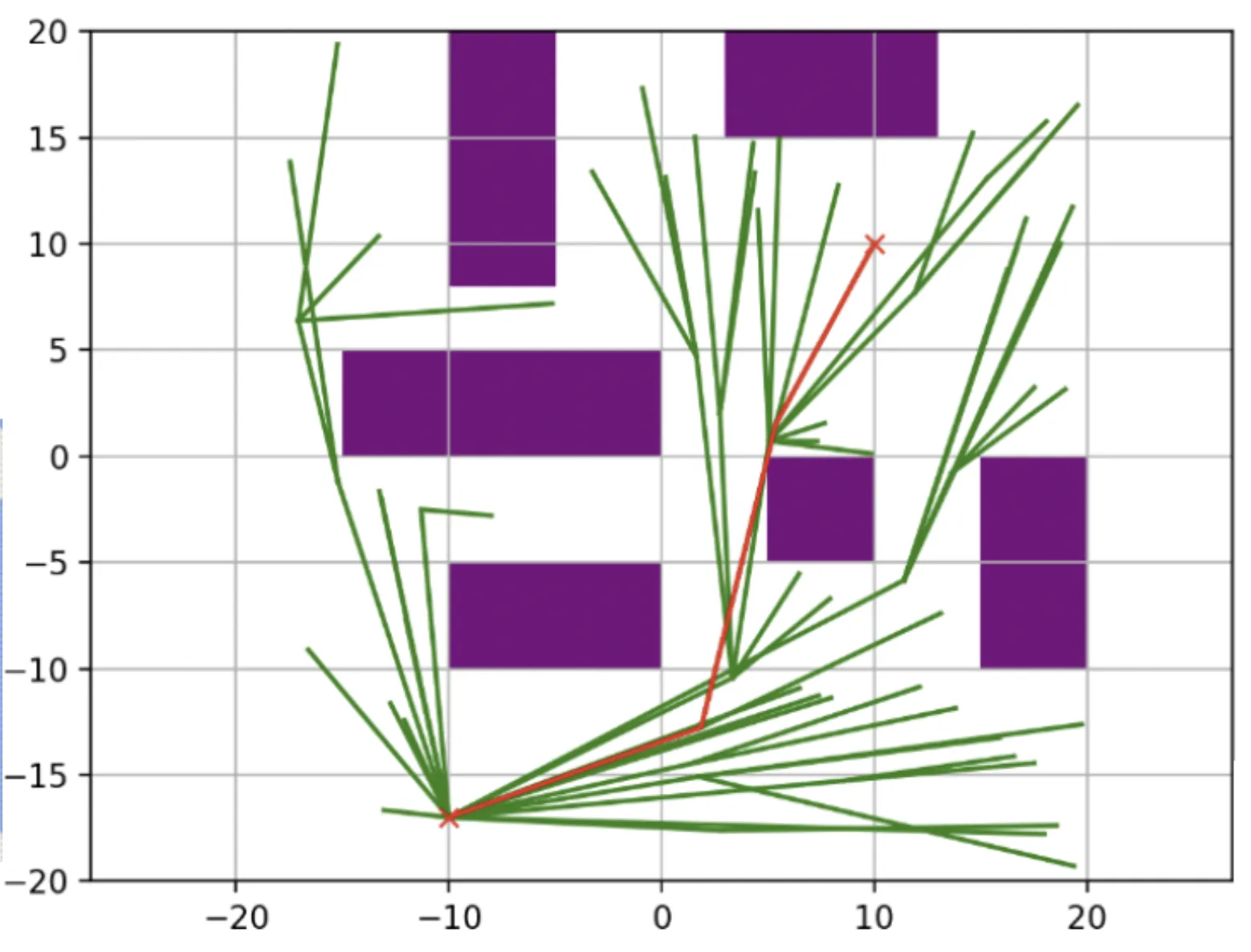
Project 3:
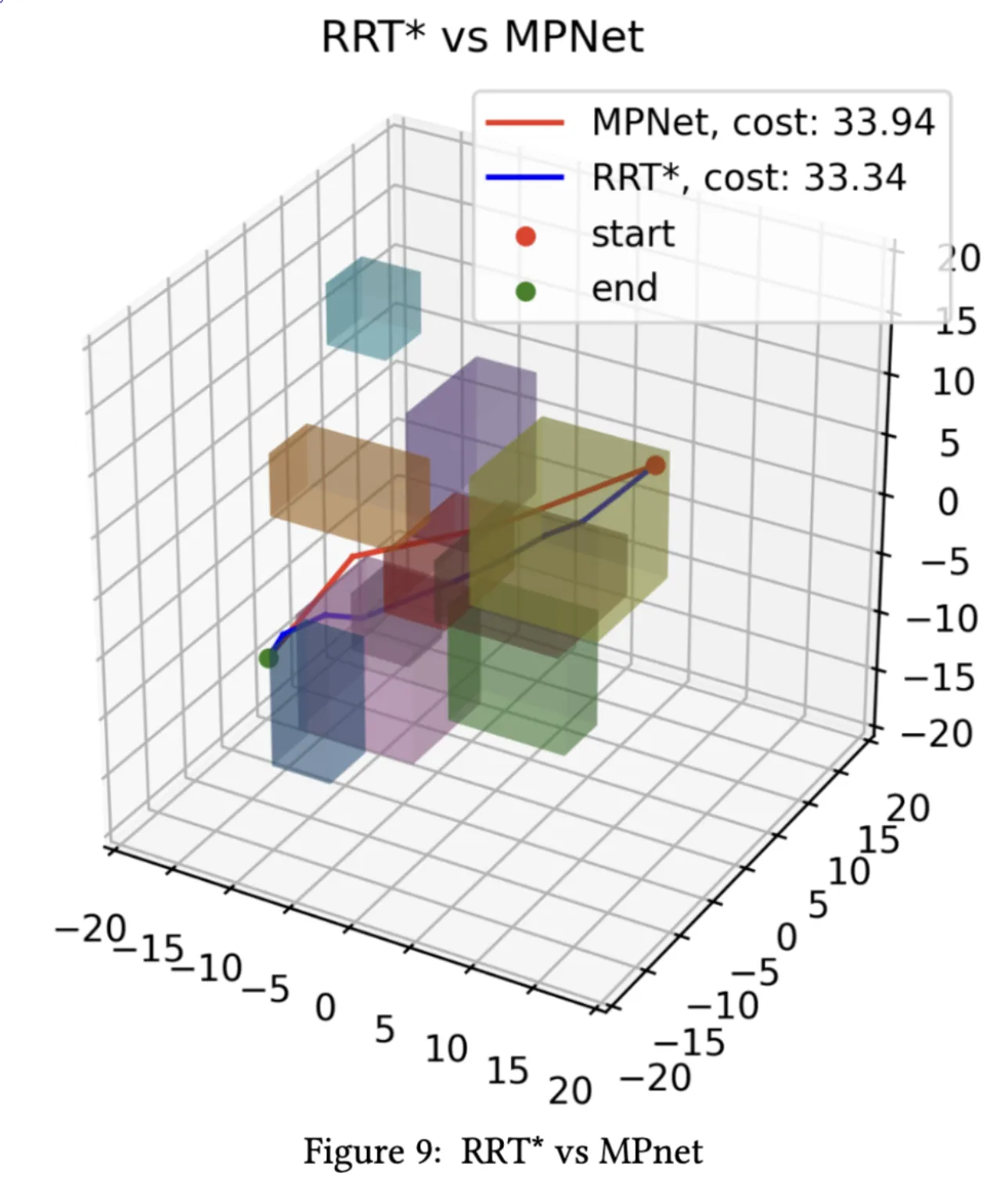
Implement MPNet in 2D/3D environments
References:
Project 4:
Implement VPG for 2-DOF arm in Pybullet
References